Supported by Dr. Osamu Ogasawara and  . . |
|
Last data update: 2014.03.03 |
Hill-Ekstrom calibrationDescriptionHill-Ekstrom calibration for one or multiple stationary periods. UsageHillEkstromCalib(tFirst, tSecond, type, twl, site, start.angle = -6, distanceFilter = FALSE, distance, plot = TRUE) Arguments
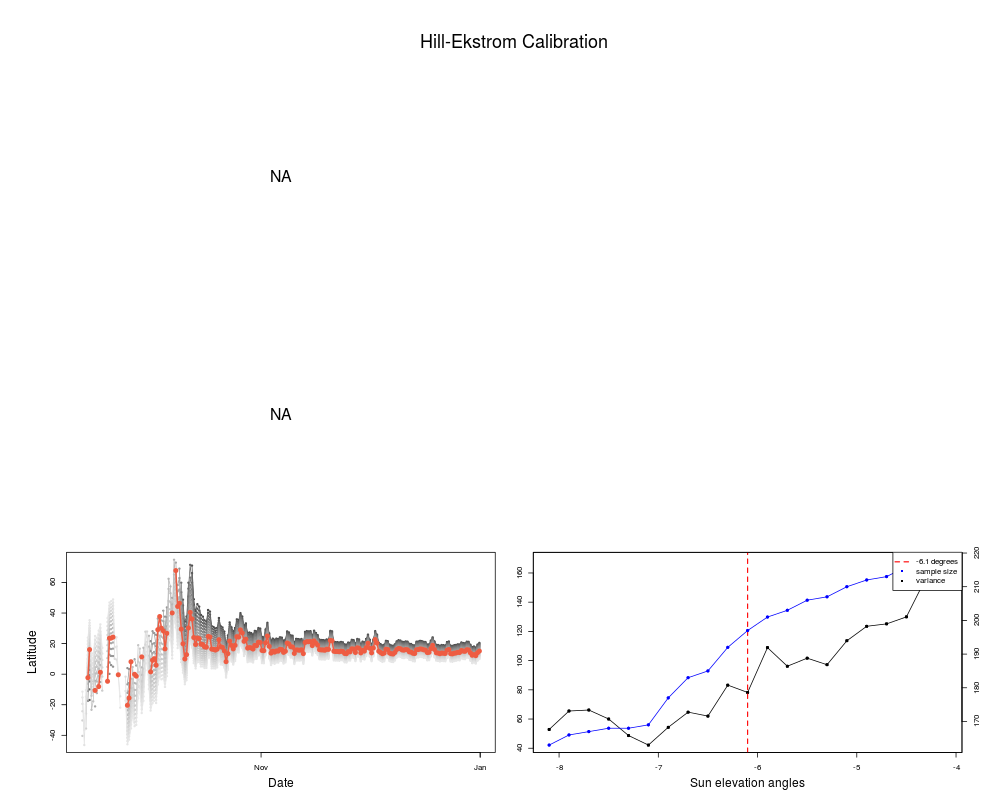
DetailsThe Hill-Ekstrom calibration has been suggested by Hill & Braun (2001) and Ekstrom (2004), and allows for calibrating data during stationary periods at unknown latitudinal positions. The Hill-Ekstrom calibration bases on an increasing error range in latitudes with an increasing mismatch between light level threshold and the used sun angle. This error is strongly amplified with proximity to the equinox times due to decreasing slope of day length variation with latitude. Furthermore, the sign of the error switches at the equinox, i.e. latitude is overestimated before the equinox and underestimated after the equinox (or vice versa depending on autumnal/vernal equinox, hemisphere, and sign of the mismatch between light level threshold and sun angle). When calculating the positions of a stationary period, the variance in latitude is minimal if the sun elevation angle fits to the defined light level threshold. Moreover, the accuracy of positions increases with decreasing variance in latitudes. However, the method is only applicable for stationary periods and under stable shading intensities. The plot produced by the function may help to judge visually if the calculated sun elevation angles are realistic (e.g. site 2 in the example below) or not (e.g. site 3 in the example below. ValueA Author(s)Simeon Lisovski ReferencesEkstrom, P.A. (2004) An advance in geolocation by light. Memoirs of the National Institute of Polar Research, Special Issue, 58, 210-226. Hill, C. & Braun, M.J. (2001) Geolocation by light level - the next step: Latitude. In: Electronic Tagging and Tracking in Marine Fisheries (eds J.R. Sibert & J. Nielsen), pp. 315-330. Kluwer Academic Publishers, The Netherlands. Lisovski, S., Hewson, C.M, Klaassen, R.H.G., Korner-Nievergelt, F., Kristensen, M.W & Hahn, S. (2012) Geolocation by light: Accuracy and precision affected by environmental factors. Methods in Ecology and Evolution, DOI: 10.1111/j.2041-210X.2012.00185.x. Examples
data(hoopoe2)
hoopoe2$tFirst <- as.POSIXct(hoopoe2$tFirst, tz = "GMT")
hoopoe2$tSecond <- as.POSIXct(hoopoe2$tSecond, tz = "GMT")
residency <- with(hoopoe2, changeLight(tFirst,tSecond,type, rise.prob=0.1,
set.prob=0.1, plot=FALSE, summary=FALSE))
HillEkstromCalib(hoopoe2,site = residency$site)
Results
R version 3.3.1 (2016-06-21) -- "Bug in Your Hair"
Copyright (C) 2016 The R Foundation for Statistical Computing
Platform: x86_64-pc-linux-gnu (64-bit)
R is free software and comes with ABSOLUTELY NO WARRANTY.
You are welcome to redistribute it under certain conditions.
Type 'license()' or 'licence()' for distribution details.
R is a collaborative project with many contributors.
Type 'contributors()' for more information and
'citation()' on how to cite R or R packages in publications.
Type 'demo()' for some demos, 'help()' for on-line help, or
'help.start()' for an HTML browser interface to help.
Type 'q()' to quit R.
> library(GeoLight)
Loading required package: maps
# maps v3.1: updated 'world': all lakes moved to separate new #
# 'lakes' database. Type '?world' or 'news(package="maps")'. #
> png(filename="/home/ddbj/snapshot/RGM3/R_CC/result/GeoLight/HillEkstromCalib.Rd_%03d_medium.png", width=480, height=480)
> ### Name: HillEkstromCalib
> ### Title: Hill-Ekstrom calibration
> ### Aliases: HillEkstromCalib
>
> ### ** Examples
>
> data(hoopoe2)
> hoopoe2$tFirst <- as.POSIXct(hoopoe2$tFirst, tz = "GMT")
> hoopoe2$tSecond <- as.POSIXct(hoopoe2$tSecond, tz = "GMT")
> residency <- with(hoopoe2, changeLight(tFirst,tSecond,type, rise.prob=0.1,
+ set.prob=0.1, plot=FALSE, summary=FALSE))
> HillEkstromCalib(hoopoe2,site = residency$site)
[1] NA NA -6.1
>
>
>
>
>
> dev.off()
null device
1
>
|