Supported by Dr. Osamu Ogasawara and  . . |
|
Last data update: 2014.03.03 |
Quick computation of updated kriging means and variances.DescriptionThis function uses kriging update formula to quickly compute kriging mean and variances at points Usagepredict_update_km(newXmean, newXvar, newXvalue, newdata.oldmean, newdata.oldsd, kn) Arguments
ValueA list with the following fields:
Author(s)Clement Chevalier (IMSV, Switzerland, and IRSN, France) ReferencesChevalier C., Bect J., Ginsbourger D., Vazquez E., Picheny V., Richet Y. (2011), Fast parallel kriging-based stepwise uncertainty reduction with application to the identification of an excursion set ,http://hal.archives-ouvertes.fr/hal-00641108/ Chevalier C., Ginsbourger D. (2012), Corrected Kriging update formulae for batch-sequential data assimilation ,http://arxiv.org/pdf/1203.6452.pdf See Also
Examples
#predict_update_km
set.seed(8)
N <- 9 #number of observations
testfun <- branin
#a 9 points initial design
design <- data.frame( matrix(runif(2*N),ncol=2) )
response <- testfun(design)
#km object with matern3_2 covariance
#params estimated by ML from the observations
model <- km(formula=~., design = design,
response = response,covtype="matern3_2")
#points where we want to compute prediction (if a point new.x is added to the doe)
n.grid <- 20 #you can run it with 100
x.grid <- y.grid <- seq(0,1,length=n.grid)
newdata <- expand.grid(x.grid,y.grid)
precalc.data <- precomputeUpdateData(model=model,integration.points=newdata)
pred2 <- predict_nobias_km(object=model,newdata=newdata,type="UK",se.compute=TRUE)
newdata.oldmean <- pred2$mean; newdata.oldsd <- pred2$sd
new.x <- matrix(c(0.6,0.6),ncol=2) #the point that we are going to add
pred1 <- predict_nobias_km(object=model,newdata=new.x,type="UK",se.compute=TRUE)
newXmean <- pred1$mean; newXvar <- pred1$sd^2; newXvalue <- pred1$mean + 2*pred1$sd
kn <- computeQuickKrigcov(model=model,integration.points=newdata,X.new=new.x,
precalc.data=precalc.data,F.newdata=pred1$F.newdata,
c.newdata=pred1$c)
updated.predictions <- predict_update_km(newXmean=newXmean,newXvar=newXvar,
newXvalue=newXvalue,newdata.oldmean=newdata.oldmean,
newdata.oldsd=newdata.oldsd,kn=kn)
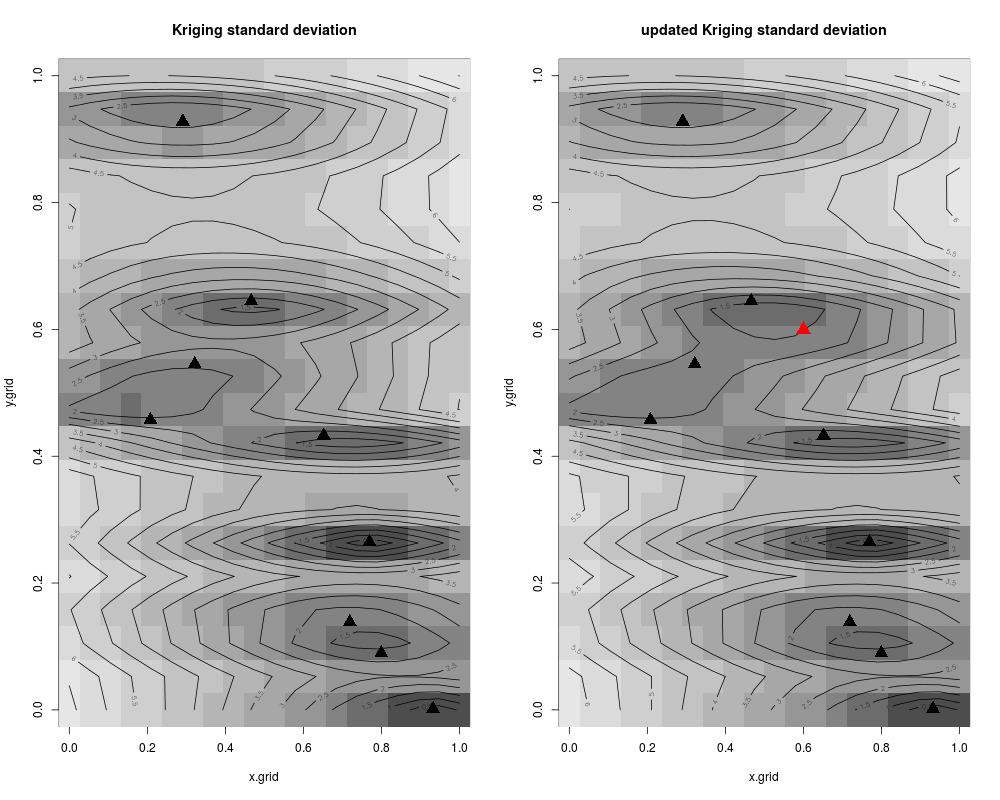
#the new kriging variance is usually lower than the old one
updated.predictions$sd - newdata.oldsd
z.grid1 <- matrix(newdata.oldsd, n.grid, n.grid)
z.grid2 <- matrix(updated.predictions$sd, n.grid, n.grid)
par(mfrow=c(1,2))
#plots: contour of the criterion, doe points and new point
image(x=x.grid,y=y.grid,z=z.grid1,col=grey.colors(10))
contour(x=x.grid,y=y.grid,z=z.grid1,15,add=TRUE)
points(design, col="black", pch=17, lwd=4,cex=2)
title("Kriging standard deviation")
image(x=x.grid,y=y.grid,z=z.grid2,col=grey.colors(10))
contour(x=x.grid,y=y.grid,z=z.grid2,15,add=TRUE)
points(design, col="black", pch=17, lwd=4,cex=2)
points(new.x, col="red", pch=17, lwd=4,cex=2)
title("updated Kriging standard deviation")
Results
R version 3.3.1 (2016-06-21) -- "Bug in Your Hair"
Copyright (C) 2016 The R Foundation for Statistical Computing
Platform: x86_64-pc-linux-gnu (64-bit)
R is free software and comes with ABSOLUTELY NO WARRANTY.
You are welcome to redistribute it under certain conditions.
Type 'license()' or 'licence()' for distribution details.
R is a collaborative project with many contributors.
Type 'contributors()' for more information and
'citation()' on how to cite R or R packages in publications.
Type 'demo()' for some demos, 'help()' for on-line help, or
'help.start()' for an HTML browser interface to help.
Type 'q()' to quit R.
> library(KrigInv)
Loading required package: DiceKriging
Loading required package: pbivnorm
Loading required package: rgenoud
## rgenoud (Version 5.7-12.4, Build Date: 2015-07-19)
## See http://sekhon.berkeley.edu/rgenoud for additional documentation.
## Please cite software as:
## Walter Mebane, Jr. and Jasjeet S. Sekhon. 2011.
## ``Genetic Optimization Using Derivatives: The rgenoud package for R.''
## Journal of Statistical Software, 42(11): 1-26.
##
Loading required package: randtoolbox
Loading required package: rngWELL
This is randtoolbox. For overview, type 'help("randtoolbox")'.
> png(filename="/home/ddbj/snapshot/RGM3/R_CC/result/KrigInv/predict_update_km.Rd_%03d_medium.png", width=480, height=480)
> ### Name: predict_update_km
> ### Title: Quick computation of updated kriging means and variances.
> ### Aliases: predict_update_km
>
> ### ** Examples
>
> #predict_update_km
>
> set.seed(8)
> N <- 9 #number of observations
> testfun <- branin
>
> #a 9 points initial design
> design <- data.frame( matrix(runif(2*N),ncol=2) )
> response <- testfun(design)
>
> #km object with matern3_2 covariance
> #params estimated by ML from the observations
> model <- km(formula=~., design = design,
+ response = response,covtype="matern3_2")
optimisation start
------------------
* estimation method : MLE
* optimisation method : BFGS
* analytical gradient : used
* trend model : ~X1 + X2
* covariance model :
- type : matern3_2
- nugget : NO
- parameters lower bounds : 1e-10 1e-10
- parameters upper bounds : 1.448893 1.853021
- best initial criterion value(s) : -25.38168
N = 2, M = 5 machine precision = 2.22045e-16
At X0, 0 variables are exactly at the bounds
At iterate 0 f= 25.382 |proj g|= 0.19431
At iterate 1 f = 25.027 |proj g|= 0.13259
At iterate 2 f = 25.014 |proj g|= 1.6725
At iterate 3 f = 25.002 |proj g|= 0.15969
At iterate 4 f = 25.001 |proj g|= 0.17792
At iterate 5 f = 24.999 |proj g|= 0.31318
At iterate 6 f = 24.998 |proj g|= 0.14968
At iterate 7 f = 24.998 |proj g|= 0.03446
At iterate 8 f = 24.998 |proj g|= 0.03458
At iterate 9 f = 24.998 |proj g|= 0.0084816
At iterate 10 f = 24.998 |proj g|= 0.038393
At iterate 11 f = 24.997 |proj g|= 1.3196
At iterate 12 f = 24.997 |proj g|= 1.3327
At iterate 13 f = 24.994 |proj g|= 1.8077
At iterate 14 f = 24.991 |proj g|= 1.8106
At iterate 15 f = 24.975 |proj g|= 1.8136
At iterate 16 f = 24.937 |proj g|= 1.8202
At iterate 17 f = 24.816 |proj g|= 1.8136
At iterate 18 f = 24.652 |proj g|= 0.81261
At iterate 19 f = 24.652 |proj g|= 0.25743
At iterate 20 f = 24.651 |proj g|= 0.0033442
At iterate 21 f = 24.651 |proj g|= 1.4045e-05
iterations 21
function evaluations 30
segments explored during Cauchy searches 22
BFGS updates skipped 0
active bounds at final generalized Cauchy point 1
norm of the final projected gradient 1.40447e-05
final function value 24.6515
F = 24.6515
final value 24.651471
converged
>
> #points where we want to compute prediction (if a point new.x is added to the doe)
> n.grid <- 20 #you can run it with 100
> x.grid <- y.grid <- seq(0,1,length=n.grid)
> newdata <- expand.grid(x.grid,y.grid)
> precalc.data <- precomputeUpdateData(model=model,integration.points=newdata)
> pred2 <- predict_nobias_km(object=model,newdata=newdata,type="UK",se.compute=TRUE)
> newdata.oldmean <- pred2$mean; newdata.oldsd <- pred2$sd
>
> new.x <- matrix(c(0.6,0.6),ncol=2) #the point that we are going to add
> pred1 <- predict_nobias_km(object=model,newdata=new.x,type="UK",se.compute=TRUE)
> newXmean <- pred1$mean; newXvar <- pred1$sd^2; newXvalue <- pred1$mean + 2*pred1$sd
>
> kn <- computeQuickKrigcov(model=model,integration.points=newdata,X.new=new.x,
+ precalc.data=precalc.data,F.newdata=pred1$F.newdata,
+ c.newdata=pred1$c)
>
> updated.predictions <- predict_update_km(newXmean=newXmean,newXvar=newXvar,
+ newXvalue=newXvalue,newdata.oldmean=newdata.oldmean,
+ newdata.oldsd=newdata.oldsd,kn=kn)
>
> #the new kriging variance is usually lower than the old one
> updated.predictions$sd - newdata.oldsd
[1] -3.127812e-01 -2.939031e-01 -2.751519e-01 -2.565330e-01 -2.380516e-01
[6] -2.197128e-01 -2.015210e-01 -1.834802e-01 -1.655938e-01 -1.478640e-01
[11] -1.302921e-01 -1.128775e-01 -9.561736e-02 -7.850507e-02 -6.152702e-02
[16] -4.465268e-02 -2.779693e-02 -1.059901e-02 -2.507032e-03 -2.005762e-02
[21] -2.755457e-01 -2.552716e-01 -2.350283e-01 -2.148189e-01 -1.946493e-01
[26] -1.745311e-01 -1.544852e-01 -1.345484e-01 -1.147842e-01 -9.529985e-02
[31] -7.627278e-02 -5.798914e-02 -4.089384e-02 -2.564054e-02 -1.310754e-02
[36] -4.318461e-03 -2.191451e-04 -1.348428e-03 -7.605062e-03 -1.830673e-02
[41] -2.579623e-01 -2.382540e-01 -2.186423e-01 -1.991270e-01 -1.797063e-01
[46] -1.603754e-01 -1.411265e-01 -1.219491e-01 -1.028332e-01 -8.377862e-02
[51] -6.482553e-02 -4.614002e-02 -2.824675e-02 -1.256528e-02 -2.113892e-03
[56] -6.809060e-04 -9.018736e-03 -2.379650e-02 -4.148245e-02 -6.023026e-02
[61] -2.307591e-01 -2.105235e-01 -1.903588e-01 -1.702687e-01 -1.502603e-01
[66] -1.303480e-01 -1.105630e-01 -9.097005e-02 -7.170215e-02 -5.302427e-02
[71] -3.544490e-02 -1.987703e-02 -7.768630e-03 -9.404747e-04 -8.281939e-04
[76] -7.492355e-03 -1.956469e-02 -3.520442e-02 -5.291099e-02 -7.173115e-02
[81] -2.155749e-01 -1.948469e-01 -1.742464e-01 -1.538303e-01 -1.336784e-01
[86] -1.139022e-01 -9.465491e-02 -7.614565e-02 -5.865414e-02 -4.254285e-02
[91] -2.826137e-02 -1.633399e-02 -7.320645e-03 -1.746501e-03 -8.437985e-06
[96] -2.284726e-03 -8.487893e-03 -1.828299e-02 -3.116906e-02 -4.657940e-02
[101] -2.485317e-01 -2.305172e-01 -2.126598e-01 -1.949637e-01 -1.774321e-01
[106] -1.600658e-01 -1.428596e-01 -1.258054e-01 -1.088936e-01 -9.211137e-02
[111] -7.544102e-02 -5.885622e-02 -4.231082e-02 -2.569365e-02 -8.569522e-03
[116] -4.299039e-03 -2.196496e-02 -3.945338e-02 -5.719797e-02 -7.529562e-02
[121] -1.919058e-01 -1.720945e-01 -1.525328e-01 -1.332971e-01 -1.144881e-01
[126] -9.623331e-02 -7.868425e-02 -6.204195e-02 -4.657142e-02 -3.260705e-02
[131] -2.055130e-02 -1.086031e-02 -4.010045e-03 -4.419493e-04 -4.920985e-04
[136] -4.309904e-03 -1.181502e-02 -2.271150e-02 -3.655515e-02 -5.283641e-02
[141] -1.737945e-01 -1.551295e-01 -1.368969e-01 -1.191866e-01 -1.021064e-01
[146] -8.576704e-02 -7.024916e-02 -5.566315e-02 -4.217351e-02 -3.000027e-02
[151] -1.942078e-02 -1.076748e-02 -4.415293e-03 -7.571034e-04 -1.606447e-04
[156] -2.870925e-03 -8.953997e-03 -1.829306e-02 -3.061887e-02 -4.556119e-02
[161] -1.679841e-01 -1.527740e-01 -1.381727e-01 -1.242276e-01 -1.109901e-01
[166] -9.846163e-02 -8.645812e-02 -7.475646e-02 -6.315645e-02 -5.146150e-02
[171] -3.949911e-02 -2.724011e-02 -1.515498e-02 -4.983101e-03 -8.812585e-05
[176] -2.852639e-03 -1.236140e-02 -2.616131e-02 -4.238107e-02 -6.002621e-02
[181] -3.695395e-02 -2.016739e-02 -7.477629e-03 -8.089445e-04 -7.522605e-04
[186] -5.979475e-03 -1.452867e-02 -2.499077e-02 -3.657534e-02 -4.889596e-02
[191] -6.178906e-02 -7.518951e-02 -8.908311e-02 -1.035339e-01 -1.185621e-01
[196] -1.341181e-01 -1.501581e-01 -1.666436e-01 -1.835403e-01 -2.008172e-01
[201] -1.886952e-01 -1.624269e-01 -1.340818e-01 -1.037956e-01 -7.273489e-02
[206] -4.358868e-02 -2.004385e-02 -5.194533e-03 -2.153522e-05 -3.372126e-03
[211] -1.325637e-02 -2.772119e-02 -4.514132e-02 -6.440053e-02 -8.482674e-02
[216] -1.059776e-01 -1.275683e-01 -1.494147e-01 -1.713973e-01 -1.934388e-01
[221] -5.818834e-02 -9.919695e-02 -1.558252e-01 -2.312517e-01 -3.286174e-01
[226] -4.502402e-01 -5.962980e-01 -7.627823e-01 -9.397185e-01 -1.111499e+00
[231] -1.259998e+00 -1.370277e+00 -1.436567e+00 -1.465246e+00 -1.468181e+00
[236] -1.455351e+00 -1.433667e+00 -1.407506e+00 -1.379528e+00 -1.351319e+00
[241] -3.113054e-02 -1.725866e-02 -6.608816e-03 -6.220008e-04 -1.550415e-03
[246] -1.295480e-02 -4.034805e-02 -9.128997e-02 -1.720636e-01 -2.767965e-01
[251] -3.790648e-01 -4.536553e-01 -4.987397e-01 -5.253226e-01 -5.428750e-01
[256] -5.562937e-01 -5.678378e-01 -5.785354e-01 -5.888648e-01 -5.990574e-01
[261] -2.340407e-01 -2.112460e-01 -1.874163e-01 -1.626197e-01 -1.370758e-01
[266] -1.112183e-01 -8.574464e-02 -6.162789e-02 -4.005485e-02 -2.224615e-02
[271] -9.285912e-03 -1.880338e-03 -7.081184e-05 -3.377521e-03 -1.110483e-02
[276] -2.252006e-02 -3.693900e-02 -5.376640e-02 -7.250628e-02 -9.275595e-02
[281] -8.420206e-02 -6.689303e-02 -5.086093e-02 -3.642994e-02 -2.394730e-02
[286] -1.376309e-02 -6.204617e-03 -1.549430e-03 -3.695647e-07 -1.667388e-03
[291] -6.555684e-03 -1.453596e-02 -2.535428e-02 -3.869219e-02 -5.421641e-02
[296] -7.159602e-02 -9.051982e-02 -1.107071e-01 -1.319122e-01 -1.539258e-01
[301] -4.046043e-02 -2.793468e-02 -1.740282e-02 -9.143648e-03 -3.412879e-03
[306] -4.216175e-04 -3.160843e-04 -3.162024e-03 -8.936513e-03 -1.753124e-02
[311] -2.876152e-02 -4.237281e-02 -5.806730e-02 -7.553752e-02 -9.448870e-02
[316] -1.146479e-01 -1.357720e-01 -1.576508e-01 -1.801070e-01 -2.029944e-01
[321] -3.113182e-02 -1.993492e-02 -1.095443e-02 -4.491813e-03 -8.116494e-04
[326] -1.133694e-04 -2.506233e-03 -7.991484e-03 -1.645716e-02 -2.769311e-02
[331] -4.141649e-02 -5.729930e-02 -7.499956e-02 -9.418842e-02 -1.145672e-01
[336] -1.358749e-01 -1.578911e-01 -1.804345e-01 -2.033591e-01 -2.265495e-01
[341] -4.969946e-02 -3.457481e-02 -2.132093e-02 -1.064210e-02 -3.325351e-03
[346] -1.038513e-04 -1.463269e-03 -7.469523e-03 -1.773420e-02 -3.156161e-02
[351] -4.815538e-02 -6.677771e-02 -8.682825e-02 -1.078581e-01 -1.295493e-01
[356] -1.516835e-01 -1.741136e-01 -1.967409e-01 -2.194993e-01 -2.423439e-01
[361] -5.295223e-02 -3.679766e-02 -2.217700e-02 -1.017625e-02 -2.290770e-03
[366] -7.650683e-05 -4.390055e-03 -1.477538e-02 -2.975726e-02 -4.770488e-02
[371] -6.737985e-02 -8.801350e-02 -1.091796e-01 -1.306559e-01 -1.523301e-01
[376] -1.741459e-01 -1.960743e-01 -2.180992e-01 -2.402104e-01 -2.623999e-01
[381] -8.411805e-03 -3.001644e-03 -2.896661e-04 -4.547391e-04 -3.592728e-03
[386] -9.701084e-03 -1.867504e-02 -3.031400e-02 -4.434248e-02 -6.044333e-02
[391] -7.828790e-02 -9.755996e-02 -1.179718e-01 -1.392728e-01 -1.612520e-01
[396] -1.837367e-01 -2.065882e-01 -2.296972e-01 -2.529789e-01 -2.763681e-01
>
> z.grid1 <- matrix(newdata.oldsd, n.grid, n.grid)
> z.grid2 <- matrix(updated.predictions$sd, n.grid, n.grid)
>
> par(mfrow=c(1,2))
>
> #plots: contour of the criterion, doe points and new point
> image(x=x.grid,y=y.grid,z=z.grid1,col=grey.colors(10))
> contour(x=x.grid,y=y.grid,z=z.grid1,15,add=TRUE)
> points(design, col="black", pch=17, lwd=4,cex=2)
> title("Kriging standard deviation")
>
> image(x=x.grid,y=y.grid,z=z.grid2,col=grey.colors(10))
> contour(x=x.grid,y=y.grid,z=z.grid2,15,add=TRUE)
> points(design, col="black", pch=17, lwd=4,cex=2)
> points(new.x, col="red", pch=17, lwd=4,cex=2)
> title("updated Kriging standard deviation")
>
>
>
>
>
>
> dev.off()
null device
1
>
|